题目描述
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为“Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为“Finish”)。
问总共有多少条不同的路径?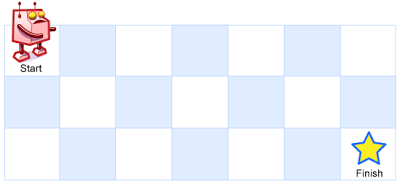
例如,上图是一个7 x 3 的网格。有多少可能的路径?
说明:m 和 n 的值均不超过 100。
示例 1:
1 | 输入: m = 3, n = 2 |
解释:
从左上角开始,总共有 3 条路径可以到达右下角。
- 向右 -> 向右 -> 向下
- 向右 -> 向下 -> 向右
- 向下 -> 向右 -> 向右
示例 2:1
2输入: m = 7, n = 3
输出: 28
分析
对于想应用成动态规划,我们首先要考虑的就是将他转化成一个i步的问题,所以走到右下角的点实际上需要的是m+n-2步,这就变成了一个可量化的步骤,然后我们把它称之为第i步,这一题由于限定了只能向下和向右走,所以不存在绕圈的情况,所以第i步依赖于第i-1之和。
我们再从第一步开始,看看能不能推到第i步
首先有对角线是:m+n-2步,我们第一步开始推
1 | step=1 |
可以看出来,很明显的当前位置依赖于上一步和他相邻的位置的和。现在还有个问题就是如何按照对角线的方式进行遍历。可以选择一个循环按照步数来进行遍历选择坐标。
答案
1 | class Solution: |

调优
可以看到很明显时间复杂度还是比较高的。我们想一想主要的耗时地方可能在于循环找y的部分做了比较多的无意义的工作,因为step可能是远大于m的,所以我们加上这一步,这样就可以删减掉很多无意义的循环:
1 | max_y = min(step + 1, m) |
既然在这一步以及做了判断了,那么
1 | if x > n - 1 or y > m - 1: |
关于y的校验的判断也可以去掉了。所以最终的代码是:
1 | class Solution: |
可以看到效果还是不错的。